Robotiskas sistēmas kļūst par aizvien būtiskāku cilvēces sastāvdaļu, tomēr šodien tiek izmantota tikai neliela daļa no šādu sistēmu potenciāla automatizēt un efektivizēt monotonus, bīstamus un resursietilpīgus darbus, celt sabiedrības labklājību un padarīt cilvēku ikdienu drošāku un ērtāku. Lai roboti veiksmīgi veiktu sarežģītus uzdevumus mainīgos apstākļos, tiem nepieciešama gan inteliģence adaptīvu lēmumu pieņemšanai un motorikas vadībai, gan spēja precīzi uztvert apkārtējo vidi. EDI misija ir piešķirt robotiem šīs spējas. No EDI zinātnieku skatu punkta, tā ir lieliska iespēja pielietot digitālās tehnoloģijas, uzkrātās zināšanas un ilggadējo pieredzi attēlu apstrādē, signālu apstrādē un mākslīgā intelekta jomās. Ar šo pieredzi mēs risinām robotikas un mašīnuztveres izaicinājumus vairākās jomās:
- industrija 4.0;
- lauksaimniecība;
- autonomā braukšana un lidošana.
Viens no mūsu izaicinājumiem ir inovatīvu digitālo tehnoloģiju izmantošana ceturtās paaudzes industrijā, ar mērķi palielināt Eiropas industrijas ražošanas kvalitāti un efektivāti. Lai to sasniegtu strauji mainīgajā ražošanas vidē, viens no galvenajiem nosacījumiem ir roboti, kas spēj ātri pielāgoties jauniem ražošanas apstākļiem un rīkoties iepriekš neparedzētās situācijās, samazinot ražošanas dīsktāves laiku līdz minimumam. EDI risinājumi šajā jomā iekļauj kameru, dziļuma sensoru un cita veida sensoru izvietošanu ap un uz industrijas robota rokām, un šo sensoru signālu apstrādi ar zināmām un jaunām metodēm.
EDI izstrāžu piemērs ir adaptīva robota sistēma, kas, izmantojot dažādus sensorus, datorredzi un dziļo mašīnmācīšanos, spēj atpazīt un šķirot dažādus, nejaušā kārtībā izvietotus objektus no kastes, kā arī pielāgoties neplānotām situācijām mūsdienu dinamiskajos ražošanas apstākļos.
Cits piemērs ir nezāļu ierobežošanas iekārta lauksaimniecībā, kuras mērķis ir nenogurstoši un efektīvi attīrīt laukus no nezālēm, bez veselībai un dabai kaitīgu vielu lietošanas. EDI šādai sistēmai izstrādā datorredzes moduli, kas spēj atšķirt kultūraugus no nezālēm, kā arī spēj kontrolēt robota kustību, lai tiktu aptverts viss lauks.

EDI strādā arī pie mašīnuztveres risinājumiem autonomas braukšanas jomā, kuras potenciāls ir gan palielināt drošību uz ceļiem, gan automatizēt un efektivizēt preču un resursu pārvadāšanu. Svarīgs izaicinājums ir uzticamu uztveres sistēmu izveide, tādēļ EDI pašbraucošās mašīnas demonstratorā tiek izmantoti gan vairāku veidu sensori (kameras, radari, lidars), gan tiek veidoti mākslīgā intelekta modeļi, kam būtu veiksmīgi jāstrādā arī atsevišķu bojātu sensoru gadījumā.
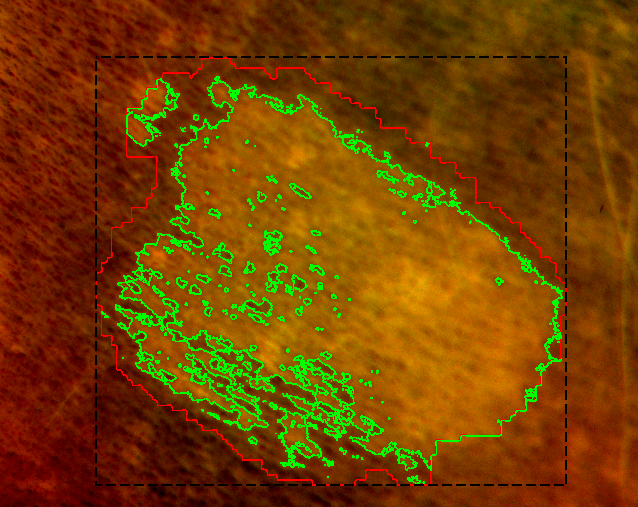
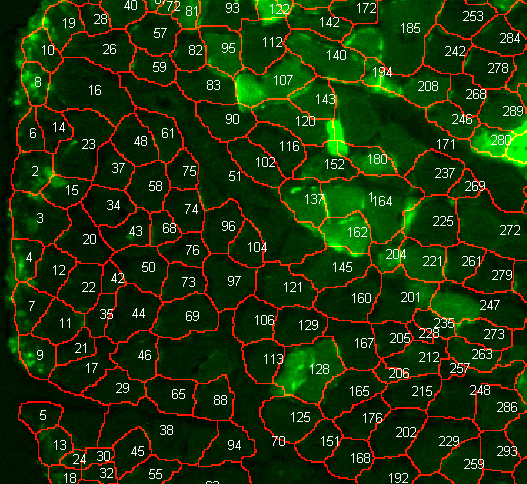
Visās iepriekšminētajās jomās EDI attīsta mākslīgā intelekta metodes, kas balstās gan uz klasiskām signālu apstrādes pieejām, gan mašīnmācīšanās pieeju (dziļā mācīšanās ar mākslīgiem neironu tīkliem – konvolūcijas un rekurentie neironu tīkli, ģenerējošie tīkli-pretinieki). Mākslīgais intelekts tiek attīstīts, jo tas šobrīd ir viens no galvenajiem rīkiem digitalizācijas procesos – tas dod milzīgas iespējas dažādu procesu automatizācijai, kam ir ekonomiskais potenciāls jaunuzņēmumu dibināšanai un jaunu tirgu apgūšanai. EDI ir ilggadēja pieredze, tradīcijas un uzkrātas zināšanas signālu apstrādē, kā arī liela pieredze datorredzes uzdevumos – attēlu klasificēšanā, segmentēšanā un objektu detektēšanā. Bez minētajiem lietojumiem, EDI ir risinājis šādus uzdevumus arī satelītu attēlu segmentēšanas, transportlīdzekļu detektēšanas, dzimumzīmju klasificēšanas (normāla/aizdomīga) un cilvēku identificēšanas (pēc plaukstu rievām un aisnsvadiem) uzdevumos. Sadarbībā ar uzņēmumiem, pēc to pieprasījuma, esam veidojuši arī automašīnu numurzīmju atpazīšanas sistēmu, datorspēļu sacensību analīzes rīku un silīcija kristālu audzēšanas monitoringa sistēmu precīzākai kristālu audzēšanas kontrolei.

Uzraudzītas mašīnmācīšanās veiksmīgas lietošanas nosacījums ir konkrētajam uzdevumam atbilstošu, marķētu datu jeb apmācības piemēru pieejamība. Viena no centrālajām fundamentālajām problēmām, kas jārisina mākslīgā intelekta jomā ir bezuzraudzības dziļā apmācība, kad neironu tīklu sistēmas iespējams apmācīt bez vai ar ierobežietiem apmācības piemēriem. Tas ļautu lietot modernas mākslīgā intelekta metodes plašākam uzdevumu lokam, nekā tikai apmācības datu bagātos uzdevumos. Šis ir viens no EDI pētījumu apakšvirzieniem. Mūsu veiksmīgās izstrādes iekļauj gan datu marķēšanu paātrinošu metožu izveidi, gan oriģinālu pieeju izveidi sintētisku apmācības datu ģenerēšanai.
Fundamentālas mākslīgā intelekta pētniecības kontekstā EDI interesē:
- virtuālās vidēs apmācītu modeļu pārnese uz reālo pasauli;
- imitācijas apmācība (robots mācās uzdevumus un to izpildi no cilvēka demonstrācijas);
- uzticams un izskaidrojams mākslīgais intelekts;
- dabas iedvesmoti navigācijas modeļi.
Būtisks EDI pētījumu virziens ir iegultā inteliģence, kas apstrādā ar sensoriem iegūto informāciju pēc iespējas tuvāk to ieguves vietai. Datu apstrāde un lēmumu pieņemšana tiek novirzīta no datu centriem un mākoņaskaitļošanas uz robežu starp mākoni un fizisko pasauli (edge/fog computing). Mašīnuztveres algoritmu iegulšana specializētās mikroshēmās, tādās kā programmējamie loģikas masīvi FPGA un cita veida vienkristālshēmas SoC, ļauj veidot mazas aizkaves un energoefektīvus risinājumus. Apvienojot šo pieeju ar pret skaitļošanas jaudām mazprasīgu algoritmu izstrādi, kas īstenojami uz lētām iekārtām, mēs spējam paplašināt autonomijas spējas tādās energoierobežotās tehnoloģijās kā maza izmēra bezpilota lidaparāti.
Projekti
-
 Mākslīgais intelekts industrijas digitalizēšanai (AI4DI) #H2020
Mākslīgais intelekts industrijas digitalizēšanai (AI4DI) #H2020
-
 Robotizētas nezāļu ierobežošanas iekārtas izveide (RONIN) #ESIF
Robotizētas nezāļu ierobežošanas iekārtas izveide (RONIN) #ESIF
-
 Programmējamas Sistēmas Inteliģencei Automobiļos (PRYSTINE) #H2020
Programmējamas Sistēmas Inteliģencei Automobiļos (PRYSTINE) #H2020
-
 Drošu tehnoloģiju integrācija aizsardzībai pret Covid-19 veselības aprūpes un augsta riska zonās (COV-CLEAN) #SRP (VPP)
Drošu tehnoloģiju integrācija aizsardzībai pret Covid-19 veselības aprūpes un augsta riska zonās (COV-CLEAN) #SRP (VPP)
-
 Aveņu un krūmcidoniju vieda bezkontakta fenotipēšana, izmantojot mašīnmācības metodes, hiperspektrālos un 3D attēlus (AKFen) #LCS (LZP)
Aveņu un krūmcidoniju vieda bezkontakta fenotipēšana, izmantojot mašīnmācības metodes, hiperspektrālos un 3D attēlus (AKFen) #LCS (LZP)
-
 Z-uztveres tehnoloģija redzei un identifikācijai, galvenie lietojumi (VIZTA) #H2020
Z-uztveres tehnoloģija redzei un identifikācijai, galvenie lietojumi (VIZTA) #H2020
-
 Mākslīgais intelekts precīzākai diagnostikai (AI4DIAG) #ESIF
Mākslīgais intelekts precīzākai diagnostikai (AI4DIAG) #ESIF
-
 Pamattehnoloģiju ietvars drošu un autonomu dronu lietojumiem (COMP4DRONES) #H2020
Pamattehnoloģiju ietvars drošu un autonomu dronu lietojumiem (COMP4DRONES) #H2020
-
 Pētījums par datorredzes paņēmienu attīstību industrijas procesu norises automatizācijai (DIPA) #ESIF
Pētījums par datorredzes paņēmienu attīstību industrijas procesu norises automatizācijai (DIPA) #ESIF
-
 Silīcija Intelektuālā Īpašuma Izstrādes Nams (SilHouse) 2. kārta #ESIF
Silīcija Intelektuālā Īpašuma Izstrādes Nams (SilHouse) 2. kārta #ESIF
-
 Industriāli inerciālais bezvadu sensors (IIBS) #ESIF
Industriāli inerciālais bezvadu sensors (IIBS) #ESIF
-
 Par kļūdām informētas, drošas un kļūdu apstākļos darboties spējīgas elektroniskās komponentes, sistēmas un arhitektūras augsti un pilnīgi automatizētai braukšanai ar mērķi nākotnes mobilitāti veidot drošāku, efektīvāku, pieejamāku un lietotājiem draudzīgāku #H2020
Par kļūdām informētas, drošas un kļūdu apstākļos darboties spējīgas elektroniskās komponentes, sistēmas un arhitektūras augsti un pilnīgi automatizētai braukšanai ar mērķi nākotnes mobilitāti veidot drošāku, efektīvāku, pieejamāku un lietotājiem draudzīgāku #H2020
-
 Intelligent Motion Control Platform for Smart Mechatronic Systems (I-MECH) #H2020
Intelligent Motion Control Platform for Smart Mechatronic Systems (I-MECH) #H2020
-
 Digitālās Tehnoloģijas, Viedā Robotika un paaugstināta kiberdrošība ātrākai ražošanai nākotnes Eiropas ražošanas ekosistēmā (TRINITY) #H2020
Digitālās Tehnoloģijas, Viedā Robotika un paaugstināta kiberdrošība ātrākai ražošanai nākotnes Eiropas ražošanas ekosistēmā (TRINITY) #H2020
-
 Kiberfizikālās sistēmas, ontoloģijas un biofotonika drošai&viedai pilsētai un sabiedrībai (VPP SOPHIS) #SRP (VPP)
Kiberfizikālās sistēmas, ontoloģijas un biofotonika drošai&viedai pilsētai un sabiedrībai (VPP SOPHIS) #SRP (VPP)
- Tehnoloģijas drošai un uzticamai gudrajai pilsētai (GUDPILS) #SRP (VPP)
-
 Dziļo neironu tīklu metode auto transporta numura zīmju lokalizācijas un klasifikācijas precizitātes uzlabošanai (DziNTA) #ESIF
Dziļo neironu tīklu metode auto transporta numura zīmju lokalizācijas un klasifikācijas precizitātes uzlabošanai (DziNTA) #ESIF
- Reāla laika stereo redzes dziļuma kartes sensors (STRIVE) #ESIF
- Multimodālas biometrijas tehnoloģija drošai un ērtai personu autentifikācijai (BiTe) #ESIF
- Plaukstas datu nolasīšanas un apstrādes sistēma (PALMs) #ESIF
- Inovatīvas biomedicīnisko attēlu iegūšanas un apstrādes tehnoloģijas (InBiT) #ESIF
-
 Multifunkcionāla inteliģenta transporta sistēmas punkta tehnoloģija (MITS) #ESIF
Multifunkcionāla inteliģenta transporta sistēmas punkta tehnoloģija (MITS) #ESIF
-
 Automatizēta roku mazgāšanas kvalitātes kontroles un kvalitātes novērtēšanas sistēma ar reāllaika atgriezenisko saiti (Handwash) #LCS (LZP)
Automatizēta roku mazgāšanas kvalitātes kontroles un kvalitātes novērtēšanas sistēma ar reāllaika atgriezenisko saiti (Handwash) #LCS (LZP)
Publikācijas
- Jānis Ārents, Ričards Cacurs, Modris Greitans, "Integration of Computervision and Artificial Intelligence Subsystems with Robot Operating System Based Motion Planning for Industrial Robots", Automatic Control and Computer Sciences Journal, Volume 52, Issue 5, 2018
- Novickis, R., Levinskis, A., Kadiķis, R., Feščenko. V., Ozols, K. (2020). Functional architecture for autonomous driving and its implementation. 17th Biennial Baltic Electronics Conference (BEC2020), Tallinn, Estonia.
- Justs, D., Novickis, R., Ozols, K., Greitāns M. (2020). Bird's-eye view image acquisition from simulated scenes using geometric inverse perspective mapping. 17th Biennial Baltic Electronics Conference (BEC2020), Tallinn, Estonia.
- Buls, E., Kadikis, R., Cacurs, R., & Ārents, J. (2019, March). Generation of synthetic training data for object detection in piles. In Eleventh International Conference on Machine Vision (ICMV 2018) (Vol. 11041, p. 110411Z)
- A.Levinskis, "Using virtual environment for autonomous vehicle algorithm validation", 2017 The 10th International Conference on Machine Vision (ICMV 2017), November 13-15, 2017, Vienna, Austria
- N. Dorbe, R. Kadikis, K. Nesenbergs. “Vehicle type and licence plate localisation and segmentation using FCN and LSTM”, Proceedings of New Challenges of Economic and Business Development 2017, Riga, Latvia, May 18-20, 2017, pp. 143-151
- Kadikis, R. (2018, April). Recurrent neural network based virtual detection line. In Tenth International Conference on Machine Vision (ICMV 2017) (Vol. 10696, p. 106961V). International Society for Optics and Photonics
- Kadiķis, R., & Freivalds, K. (2013, December). Vehicle classification in video using virtual detection lines. In Sixth International Conference on Machine Vision (ICMV 2013) (Vol. 9067, p. 90670Y). International Society for Optics and Photonics.
- Martin Dendaluce Jahnke, Francesco Cosco, Rihards Novickis, Joshué Pérez Rastelli, Vicente Gomez-Garay "Efficient Neural Network Implementations on Parallel Embedded Platforms applied to Real-Time Torque-Vectoring Optimization using Predictions for Multi-Motor Electric Vehicles", Electronics (ISSN 2079-9292)
- Kadiķis, R., & Freivalds, K. (2013). Efficient video processing method for traffic monitoring combining motion detection and background subtraction. In Proceedings of the Fourth International Conference on Signal and Image Processing 2012 (ICSIP 2012) (pp. 131-141). Springer, India.
- Harijs Grinbergs, Artis Mednis, and Modris Greitans. Real-time object tracking in 3D space using mobile platform with passive stereo vision system. N. Tagoug (Ed.): Proceedings of World Congress on Multimedia and Computer Science (WCMCS 2013), pp. 60-68, 2013. Association of Computer Electronics and Electrical Engineers, 2013.
- BAUMS, A., GORDYUSINS, A., 2015. An evaluation the motion of a reconfigurable mobile robot over a rough terrain. Automatic Control and Computer Sciences, Allerton Press, Inc., vol.49. no.5, pp. 39- 45
- Baums A., Gordjusins A., Kanonirs G., „Developvement of mobile research robot”, ICINCO 2012, 9th International Conference on Informatics in Control, Automation and Robotics., 28-31 July, 2012, Rome, Italy. (Electronic Proceedings), pp. 329-332.
- A.Baums, A. Gordjušins, A. Kazuša "Mobilo robotu veidošanas tehniskie aspekti un attīstības vēsture" „Rīgas tehniskā koledža Zinātniskie raksti”, 7.sējums –Rīga, RTU, 7.sēj., 2009, lpp. 32-42.
- Physical model for solving problems of cost-effective mobile robot development
- Baums A., Gordjusins A., Kazuša A., „Technical aspects of development and evolution history of mobile robots”. Riga technical college scentific proceedings. Riga, Vol. 7. 2009, pp. 32-42.
- O. Nikisins, M. Greitans. Local binary patterns and neural network based technique for robust face detection and localization. Proceedings of the Special Interest Group on Biometrics and Electronic Signatures (BIOSIG 2012), Status: accepted, September 2012.
Patenti
- Patent No. EP2700054 B1 “System and method for video-based vehicle detection”
- Patent No. EP 2695104 B1 “Biometric authentication apparatus and biometric authentication method”
- LR patent No.14998. "Ierīce ādas melanomas atšķiršanai no labdabīgas dzimumzīmes"
- LR patents Nr. 13942 “Digitālu pelēko toņu attēlu analizators”
- LR patents Nr. 13857 “Digitālu rentgena attēlu analizators svešķermeņu atklāšanai objektos reālā laika režīmā”